SP2-Sensing: Development of sensing tools
Download SP2 presentation in pdf format: clic here
4 - Calibration of sensors and uncertainties of the measurements
Given that the scale provided there is not standard, the calibration of a microforces sensor is delicate.
The most reliable method is to measure eigen frequencies Fp of the devices. All the devices being governed by differential
equations of second order, it is usually possible to simplify the behavior by considering a theoretical mass/spring system with a
single degree of freedom. In these conditions, and for a low damping coefficient, the stiffness K of the device is calculated with the equation:
K=4pi2 M fp2
For the AFM, the calibration of cantilevers is achieved in two ways, either by exciting the cantilever using the piezoresistive
tube of the AFM, but it is a much more reliable to measure the thermal noise naturally present, using a laser interferometer
pointing to the extremity of the cantilever. The model of encastred beam is necessary to calculate the stiffness from the
frequencies of the eigen modes, for a given geometry.
The calibration of the passive levitation device is based on the same principle: exitation of the oscillation
in the direction of measurement and then measurement of the natural frequency. An electromagnetic device used to generate
the capillary oscillations has been coupled to an automatic identification of the transfer function of the 1D model. The identification
is used to evaluate the stiffness of the magnetic spring but also the damping coefficient of the oscillations.
The calibration of the sensor Femto Tools is conducted by the manufacturer.
A second calibration method consist in using a sensor as a reference (passive levitation for example) and to calibrate other sensors from this reference.
5 - Example of measurements on the platform
5.1 - Pull-off strength for a sphere/plan contact
The AFM is used to measure the pull-off strength of the contacts between a sphere and a plan. It uses cantilevers equipped with a glass microball glued at the extremity. The study gives measurement of the influence of a prestrength and environment conditions on the intensity of the pull-off strength.
5.2 - Frictional force of a micro-object on its substrate
Measurements have been carried out using the levitation sensor and gave the value of the effort that is needed to push a grain of sodium chloride of 400 µm length on a mirror polished glass. This effort is in the micronewton range and is very sensible to the humidity degree of the environment.
5.3 - Comparison between AFM sensor and passive levitation
The goal was to show that the calibrations of the AFM and levitation sensors are valid. To perform these tests, the sensors have been placed face to face (Fig.6).
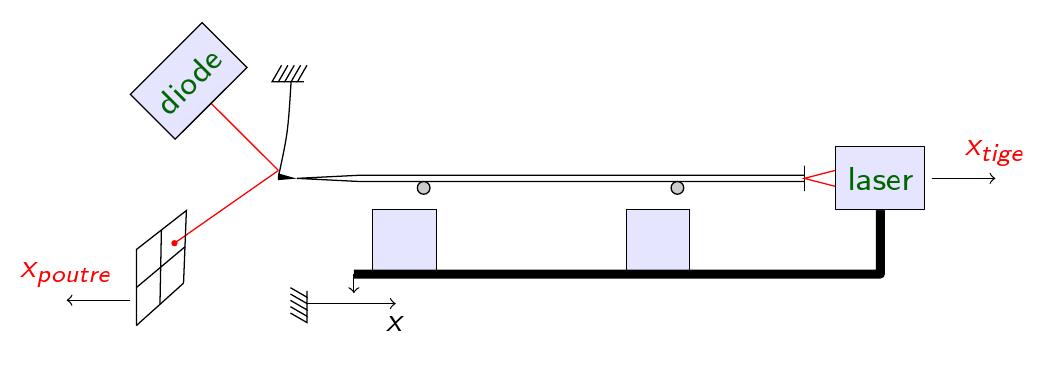
 Fig.6 - Confrontation in action / reaction of levitation and the AFM.
Fig.6 - Confrontation in action / reaction of levitation and the AFM.
The gradual approach of the tip of the capillary against several AFM cantilevers shows a good correlation of the measured effort (Fig.7).
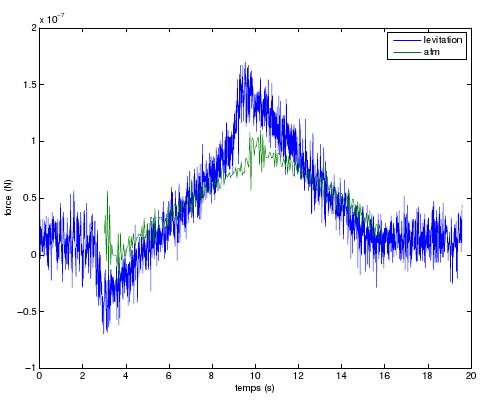
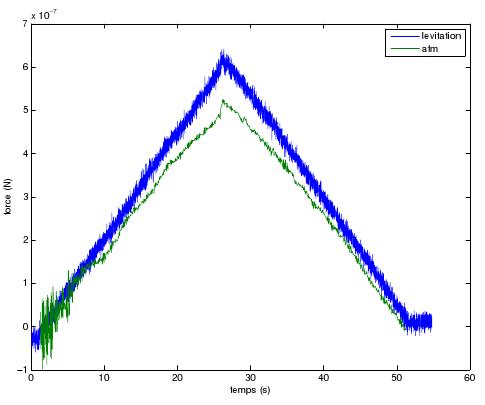 Fig.7 - Comparison of measurements of the AFM and the levitation sensors for two different cantilevers.
Fig.7 - Comparison of measurements of the AFM and the levitation sensors for two different cantilevers.

The stiffness implemented are about 0.02 N/m and N/rad. The originality of this sensor is that it is equipped with a device providing a measure
of efforts without movement of the floating platform. It implements a feedback loop that drives a set of coils used to generate electromagnetic
forces who oppose efforts to external efforts applied. It has be shown that injected currents in the coils are the image of these efforts.
It is also expected to operate in different modes such as: maintaining a constant effort, release under limited effort, positioning, etc...
The development of this sensor is funded by ANR Psirob Stilmicroforce.
3.4.2 - Piezo resistive sensor [7]
Based on a piezo resistive principle, the developped sensor uses microcantilevers (fig.5). In this case, the displacement
measurement is performed with the variation of the electrical resistance of the cantilever. There is no external displacement sensor needed.
The structure actualy developped is composed of several coupled cantilevers. This work consists in modelling, designing the structure
of the sensor, adaptating the range of measurement with a good resolution and reaching a bandwidth in accordance with the dynamic of the measurement.
This sensor will be useful in order to apply large preloads on objects or for force friction measurements .
 Fig.5 - Principle of a piezo resistive cantilever.
Fig.5 - Principle of a piezo resistive cantilever.
5.4 - Measuring the elasticity of an ovocyte [8]
The passive levitation sensor has been implemented in some biomedical experiments. The aim was to determine the elasticity of the pelucide membrane of a human egg, in order to identify mechanical criteria usefull to determine the maturity of the eggs before fertilization. It turned out that during the measurements, surface tension acting on the capillary around its entrance point in the oocyte culture fluid, have had an adverse effect on quality of measurements.