SP3-Positioning: Control of a micropositioning robotic structure
Context and objective
The force measurement of distance force and adhesion force requires the fine positioning of both objects tested. The sub-project SP3-POSITIONING is focusing on the control of the relative position between both objects. Three typical measure cases will be studied:
- the measure of a contact force (typ. Pull-off force) which requires to control the contact position between objects (image-a),
- the measure of interactions forces which requires to control the spatial relative position (image-b),
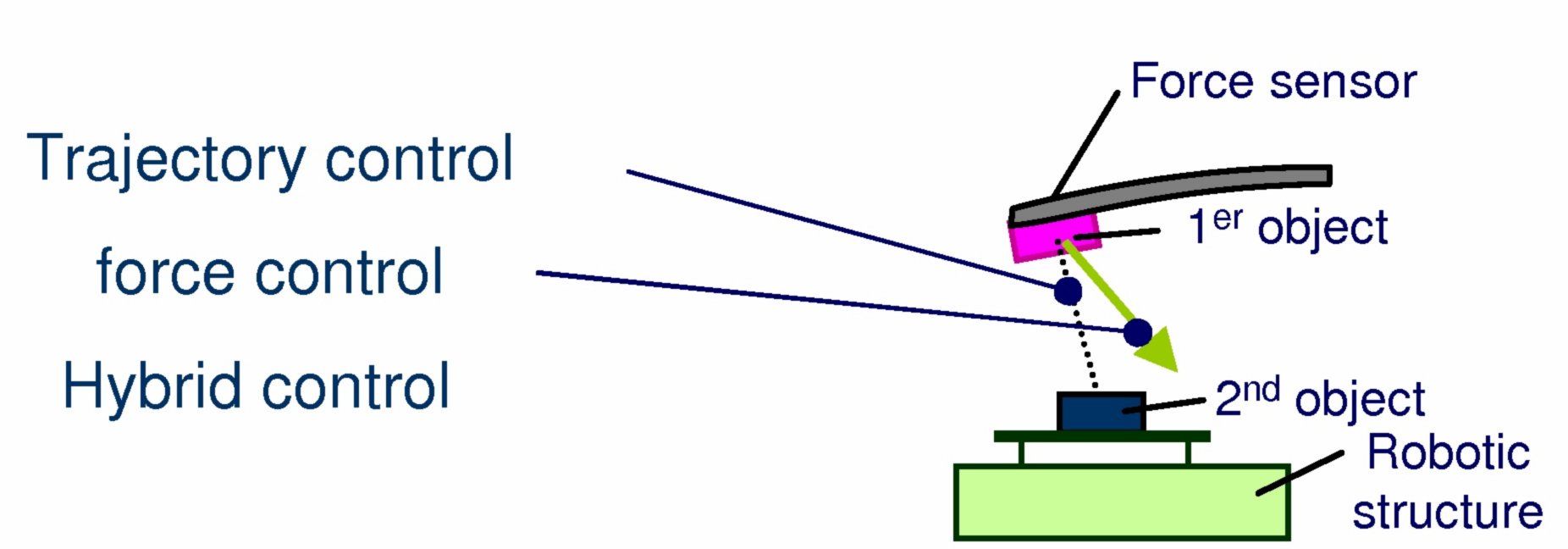
- the measure of a friction force which requires to use an hybrid control of the trajectory of the first object relatively to the second one and of the normal contact force (image-c).
 Images -a, -b and -c.
Images -a, -b and -c.
The general aim of the Sub-project is thus to produce innovative methods able to control the trajectory and the position of a micro-objets during force measurement.
 General aim.
General aim.
Current work
The following topics are in progress:
- Correction of the piezoelectric hysteresis of the AFM micropositionning tube using hysteresis compensation methods,
- test of different 6DOF robotic structures able to position the objects.