SP2-Sensing: Development of sensing tools
Download SP2 presentation in pdf format: clic here
1 - Roles and objectives
The role of this sub-project is to develop, implement and operationalize many technological tools that will be used to obtain experimental
data necessary to understanding the interaction phenomena, which occur between elements of micrometer size, within the different scenarios
that take place in practice during the micromanipulation tasks. These forces must be measured experimentally in order to validate the
theoretical models developed in the sub-project 1 (SP1).
Given the difficulties in measuring the interaction efforts, who are of various kinds (friction, surface tension, force field,
pull-off, electrostatic force) and that are acting in different environments, we decided to develop sensors operating according
to classical principles of physics, but also originals ones which are very powerful on the scale envisaged. Each sensor has its
advantages and disadvantages. The idea is to provide maximum measurement solutions for a given problem. It is also needed to ensure
the best calibration of these force sensors.
People involved in SP2 are J. Abadie, P. Rougeot, S. Rougeot and S. Régnier.
2 - Microforce sensor generalities
The force is an intensive phenomenon. Rather to measure the force itself, the principle is to measure the effect of the force on a sensing device.
This device consists of a sensitive body, which has a moving part of mass M, and which is interacting with the soil through a elastic liaison with
a materialistic nature or not. This interaction qualified of spring, keeping in mind that it is only a mathematical concept (for exemple a non
materialistic magnetic spring or an elastic blade), has a mechanical stiffness K.
To achieve a good microforces sensor able of measuring a range of a few tens of nN to a few hundreds of µN, it is necessary to have a device with
a stiffness less than 1 N/m. Then have a powerful sensor giving an accurate measurement of the displacement x of the sensitive body. The force F
is simply calculated using the formula:
Finally, it is essential that the force sensor integrates the best displacement sensor. It also has a mechanical stiffness K as stable and
as small as possible. It avoid cases where K depends on the movement of the sensitive body, conditions of temperature, humidity, etc...
The calibration of the sensor consist in determining an accurate value of K.
3 - The sensors of the Nanorol platform
There are three sensors currently operational on the Nanorol platform. It is a modified atomic force microscope (AFM), a passive levitation sensor and a commercial sensor. Two other sensors are under study and development, using a magnetic flotation, the second a piezoresistive principle.
3.1 - Modified AFM sensor [1] [2]
This is a classic AFM not adapted to measure surface topography but rather a measure of pull-off forces, surface tension, etc... (fig.1).
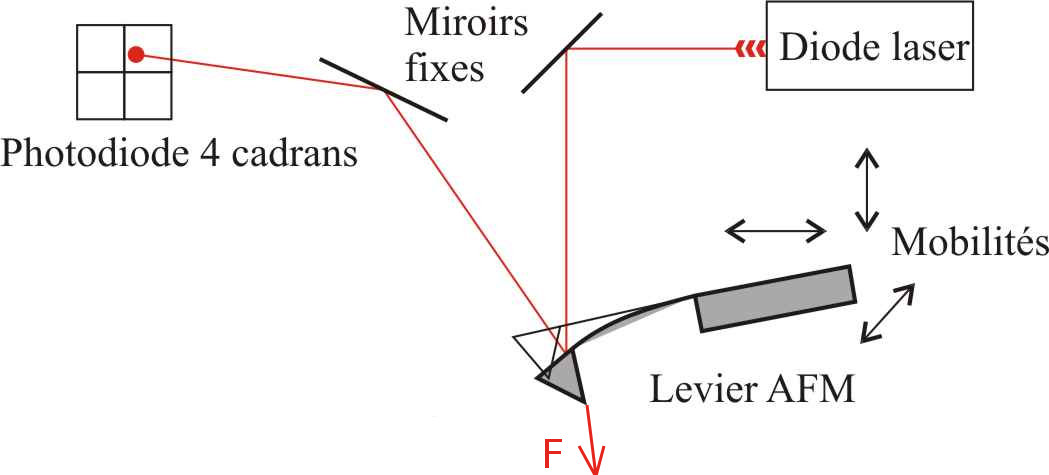
 Fig.1 - AFM used for NANORL.
Fig.1 - AFM used for NANORL.
Features:
- stiffness of cantilever used between 0.03 N/m and 14 N/m,
- a cantilever of stiffness 0.2 N/m allows a measure of 0 to 600 nN with a resolution of 10 nN,
- cantilever stiffness calibration by excitation of eigen modes, or thermal noise measurement,
- measure of a two direction force using the 4 framework photodiode.
Known limitations:
- coupling movement of the tip of the cantilever generating unexpected behavior in the process of withdrawal and approach between the tip and the substrate, mainly during the phases of contact,
- calibration of the deflection measurement of the lever by the photodiode uncertain.